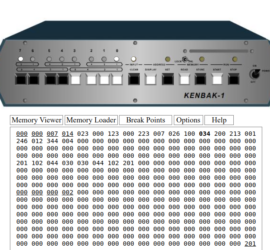
Kenbak-1 Indexed Addressing
Introduction to Kenbak-1 Indexed Addressing Kenbak-1 Indexed Addressing allows you to have a variable address. Typically, we use this to move through a series of memory locations to get or store data. In this example, we’ll create some crossing lights. In other words, the lights will start at both ends Read More »