Proportional, Integral, Derivative (PID)
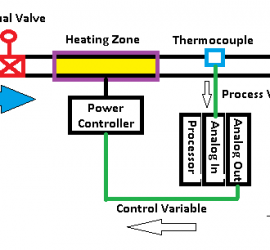
Introduction to Proportional, Integral, and Derivative (PID) Proportional, Integral, and Derivative (PID) is a 3-step formula to bring a process to a setpoint, and attempt to hold it there. The example we will use is a heating process. We will bring fluid in a pipe up to a Read More »