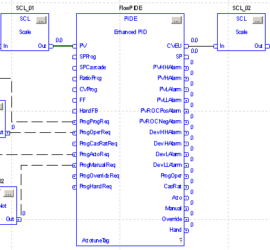
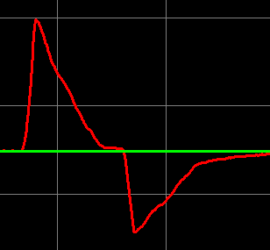
Troubleshooting PID Loops
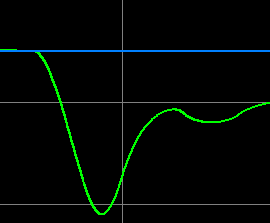
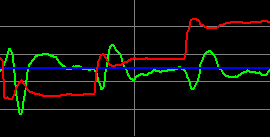
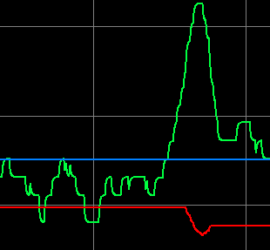
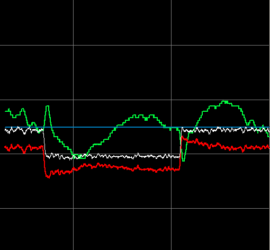
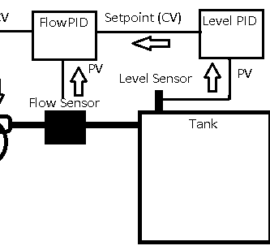
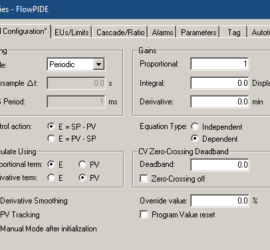
Introduction to Troubleshooting PID Loops Indeed troubleshooting PID Loops can be frustrating. It can take time, patience, and knowledge of the process. In this section, we’ll look at a few common issues you might have with PID loops, and how to solve those issues. This is for example only, and Read More »