Feed Forward for PlantPAx PID
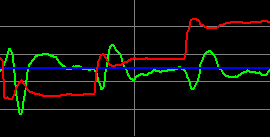
Introduction to Feed Forward for PlantPAx PID With Feed Forward for PlantPAx PID, we can adjust the control variable directly. For example, if the load increases from a tank, we can immediately provide a higher setpoint to the inflow. This can drastically improve response time. Additionally, it will usually reduce Read More »