Function Blocks for PlantPAx PID
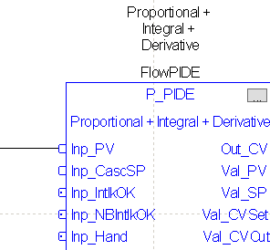
Introduction to Function Blocks for PlantPAx PID In this section, we’ll add our Function Blocks for PlantPAx PID. In our previous sections, we imported the add-on instructions. At this point, we are ready to set up our function block logic. If you have not already done so, created a periodic Read More »