PID with Ziegler-Nichols Method
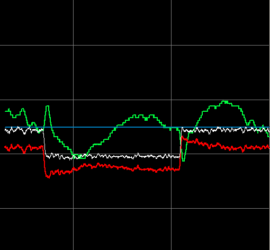
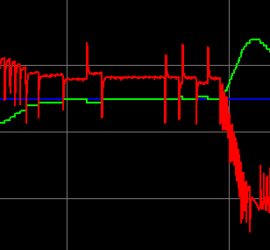
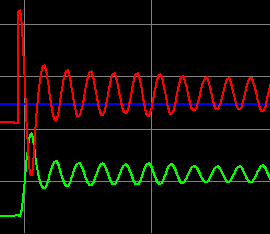
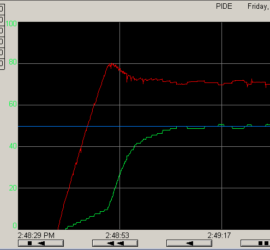
Introduction to PID tuning with Ziegler-Nichols method (rule based variation) In this section, we’ll tune a PID with the Ziegler-Nichols Method. This will be a rule based variation. Previously, we discussed a trial and error based method. Recall that we increased Kc until the loop was unstable. At this point, Read More »